Diagrama fotón estelar: proyecto 1



INGRESO TINKERCAD SEXTO A:
Link sexto b
link sexto A
Proyecto N° 2 / Segundo Periodo




Primera activación tema "Mecanografía" (15%)
1. Realiza este ejercicio para medir la velocidad.
2. Realiza el juego: https://www.ratatype.es/typing-games/race/






3. Realiza los ejercicios del 1 al 4 en https://agilefingers.com/es/curso
12-02-2025Con un compañero diseña sigiente circuito de Diodos Leds

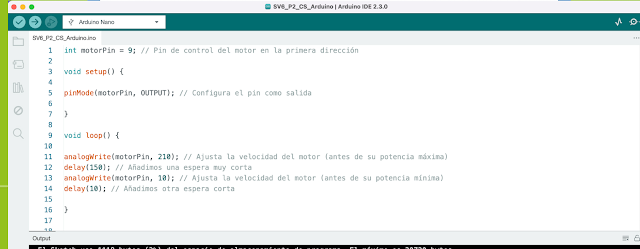
Codigo:
Responde:
¿Para qué sirven los LEDs en este circuito y cómo podemos hacer que se enciendan o apaguen usando Arduino? ¿Cuál es la función de los cables rojos conectados a los pines digitales de la placa Arduino? ¿Por qué crees que se usa un cable negro conectado a la línea de la protoboard y al pin GND de la placa Arduino? Si queremos que los LEDs se enciendan uno por uno, ¿qué instrucciones deberíamos usar en el código de Arduino? ¿Cómo podríamos modificar este circuito para que los LEDs parpadeen más rápido o más lento?

26-02-2025 El Potenciometro

10-02-2023

Actividad evaluativa final 30%
En parejas desarolla el siguiente circuito "Secuencia de luces LED"

code:

EjercicioMateriales: Sensor de ultrasonidoLed, cables Jumper, Protoboard, arduino

rover proyecto 4 (seguidor de luz y evasor de obstaculos )


Segundo Periodo // Rover con sensor de ultrasonido que esquiva obstáculos
Link codigo de programación
driagrama

evasor de obstaculos


rover primera parte.

link codigo de programación https://drive.google.com/file/d/1Ql8wdRJ-gD_d1v58uaIVeK8AQ0Gx2nF-/view?usp=sharing

link codigo de programación https://drive.google.com/file/d/1Ql8wdRJ-gD_d1v58uaIVeK8AQ0Gx2nF-/view?usp=sharing
6/02/2024

Cuarto Periodo // Energia_renovable uso de fotoceldas
Actividad Evaluativa 4 Periodo


Identifica diferentes sensores y actuadores usados en arduino

Tercer Periodo / Actividad Final
1. Relaciona las partes de arduino:
2. Resolver
3. Resolver

2. Lee el siguiente texto y realiza la actividad que se propone a continuación del mismo
HISTORIA DEL COMPUTADOR:
En el oriente hacia el siglo XIII aparece la primera máquina de calcular: El ábaco, este era utilizado para sumar, y la rapidez de dicha operación matemática dependía de la habilidad de quien manejaba el ábaco.
Luego en el siglo XVII un filósofo y físico llamado Blaise Pascal, inventa La Pascalina, esta máquina realizaba a demás de sumas, restas; y su creador la inventó para ayudar a su padre que era un recaudador de impuestos.
Ya en el siglo XIX un matemático inglés llamado Charles Babbage, creó la primera máquina programable; era mecánica, y con ella se podían realizar diferentes funciones, lo que significa que era más sofisticada y especializada que las anteriores.
En el siglo XX para el año 1937, Howard Aiken utilizando los conocimientos que aportó Charles Babbage, realizó otra innovación en el área de la computación y creo la primera máquina calculadora automática, esta máquina llegó a conocerse como la Mark I.
Hacia el año 1945, fue creada la primera calculadora electrónica por John W.Mauchly y Presper Ecker, ella era utilizada con fines militares y se llamaba ENIAC; está máquina podría realizar 300 multiplicaciones por segundo, era lenta, de gran tamaño y consumía mucha electricidad, para su construcción se utilizo un nuevo componente; las válvulas de cristal. Después de la construcción de esta máquina se fueron utilizando cada vez nuevos componentes así:
· Entre 1960 y 1965 se remplazaron las válvula de cristal por los transistores
· Entre 1965 y 1970 Los transistores fueron remplazados por los circuitos o chips.
· Entre 1970 y 1980 se inventó el microprocesador, a través de los cuales fue posible colocar todos los componentes electrónicos de un computador en un solo chip.
Es así como como a través de los años se ha reducido el tamaño y el costo del computador y se han diversificado las distintas tareas que se pueden realizar mediante su uso.
2. Realice una investigación para responder cada una de las preguntas (Agregue la imagen correspondiente) / Word o ´Power Point
1. Fundador de la maquina Turing2. Creador de la web y año3. Fundadores de Google y año4. Fundador de Microsoft y año 5. Fundador de Apple y año 6. Fundador de Linux y año7. Porque el logo de google es de colores? 8. Quien fue el primer programador de la historia.
HISTORIA DEL COMPUTADOR:
En el oriente hacia el siglo XIII aparece la primera máquina de calcular: El ábaco, este era utilizado para sumar, y la rapidez de dicha operación matemática dependía de la habilidad de quien manejaba el ábaco.
Luego en el siglo XVII un filósofo y físico llamado Blaise Pascal, inventa La Pascalina, esta máquina realizaba a demás de sumas, restas; y su creador la inventó para ayudar a su padre que era un recaudador de impuestos.
Ya en el siglo XIX un matemático inglés llamado Charles Babbage, creó la primera máquina programable; era mecánica, y con ella se podían realizar diferentes funciones, lo que significa que era más sofisticada y especializada que las anteriores.
En el siglo XX para el año 1937, Howard Aiken utilizando los conocimientos que aportó Charles Babbage, realizó otra innovación en el área de la computación y creo la primera máquina calculadora automática, esta máquina llegó a conocerse como la Mark I.
Hacia el año 1945, fue creada la primera calculadora electrónica por John W.Mauchly y Presper Ecker, ella era utilizada con fines militares y se llamaba ENIAC; está máquina podría realizar 300 multiplicaciones por segundo, era lenta, de gran tamaño y consumía mucha electricidad, para su construcción se utilizo un nuevo componente; las válvulas de cristal. Después de la construcción de esta máquina se fueron utilizando cada vez nuevos componentes así:
· Entre 1960 y 1965 se remplazaron las válvula de cristal por los transistores
· Entre 1965 y 1970 Los transistores fueron remplazados por los circuitos o chips.
· Entre 1970 y 1980 se inventó el microprocesador, a través de los cuales fue posible colocar todos los componentes electrónicos de un computador en un solo chip.
Es así como como a través de los años se ha reducido el tamaño y el costo del computador y se han diversificado las distintas tareas que se pueden realizar mediante su uso.
2. Realice una investigación para responder cada una de las preguntas (Agregue la imagen correspondiente) / Word o ´Power Point
1. En ms word completar el siguiente mapa, agregando más componentes de harware y software, con sus respectivas imagenes. (Utliza Formas con color y diseño). 

14/02/2022
Los sistemas Operativos.
Realiza una presentación en Power Point en base a la siguiente infografía sobre los sistemas operativos, agregar imágenes y animaciones a la presentación.
- Que es un sistemas operativo
- Familia de sistemas operativos
- Windows (Versiones) - crear tabla
- Linux (Distribuciones más populares) - crear tabla
- Mac OS (Versiones)
- Sistemas operativos Móviles
- IoS
- Android
- Windows Mobile
- Funciones o tareas principales
 21/02/2022
21/02/2022
Elabora en MSWord o Power Point
MICROSOFT EXCEL 7/03/2022
1. Elabora usando Excel, para calcular el importe multiplica la cantidad por el precio unitario, el subtotal es la suma de la columna importe, el IVA el 21% del importe y el total la suma de subtotal más IVA.

2. Diseña tu horario de clases.

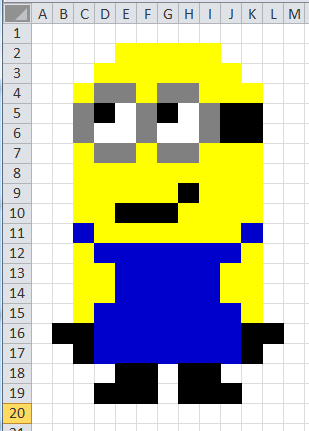
3. Dibuja usando excel
4. Elabora usando Excel:

5. Elabora en excel

6. realizar el formato y sumar los totales

7. realizar las operaciones

8. realizar las operaciones

9. Dibujar



10.

- Que es un sistemas operativo
- Familia de sistemas operativos
- Windows (Versiones) - crear tabla
- Linux (Distribuciones más populares) - crear tabla
- Mac OS (Versiones)
- Sistemas operativos Móviles
- IoS
- Android
- Windows Mobile
- Funciones o tareas principales








cuarto Periodo 26 / 09/2022

1. Usando Word o power point resolver


2. Ingrese a Tinkercad con el codigo de la clase: FV8HF9XPQBAS
ingrese su usuario que esta en esta lista: https://drive.google.com/file/d/13ztux10AlUroeFxlePD8bYPcNrECJAHW/view?usp=sharing

3. Realice una presnetación en power Point sobre 10 aparatos que usen energia solar, incluir imagen y descripción.
Actividad evaluativa final 3 periodo
2. Diseñe el circuito de los motores
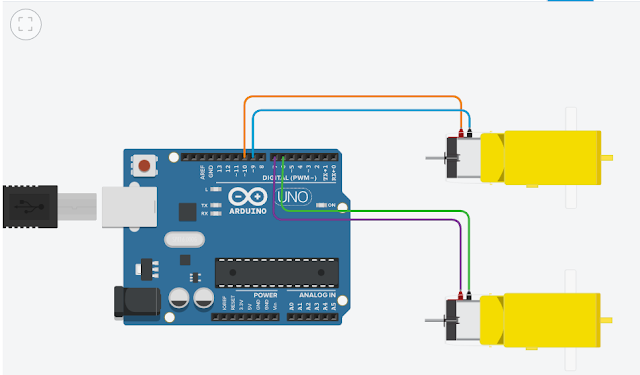
Programación Movimientos en pista del Rover

No hay comentarios:
Publicar un comentario